Классификация систем ЧПУ
Продолжаем публикацию материалов из учебного пособия «Металлорежущие станки с ЧПУ» под редакцией В.Б. Мещерякова. На этот раз разберем классификацию систем ЧПУ.
Исходя из технологических задач управления обработкой заготовок может применяться:
а) позиционное ЧПУ станком, при котором перемещение его рабочих органов происходит в заданные точки, причем траектории перемещения не задаются (рис. 2.7, а). Обработка заготовки (сверление, расточка отверстий и др.) производится после установки ее (или инструмента) в заданную координату (X и Y). Поэтому эти перемещения рабочих органов происходят на холостом ходу, который необходимо осуществлять на максимально возможной скорости. Точность холостых (установочных) перемещений в основном должна быть очень высокой (особенно при расточке координатных отверстий). Обработка заготовок требует, как правило, применения большого количества инструментов (сверл, зенкеров, зенковок, расточных резцов, разверток, метчиков), что ставит вопрос об их автоматической смене;
б) контурное ЧПУ станком, при котором перемещение его рабочих органов происходит по заданной траектории и с заданной скоростью для получения необходимого контура обработки (рис. 2.7, б–г), т.е. здесь производится управление в основном рабочими ходами. При первом варианте (см. рис. 2.7, б) обработка производится инструментом, который перемещается параллельно осям координат (по отрезкам). Поэтому обрабатываемые участки профиля заготовки могут быть только параллельными осям координат (см. рис. 2.7, б).
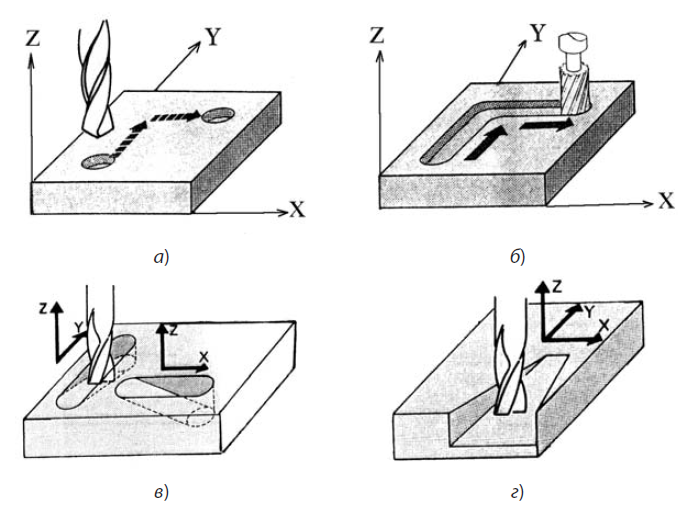
Рис. 2.7. Примеры обработок заготовок исходя из различных задач управления:
а — управление перемещениями в отдельные позиции;
б — управление перемещениями по контуру, но параллельно осям координат;
в — управление перемещениями по контуру одновременно по двум любым координатам;
г — управление перемещениями по контуру одновременно по трем координатам
При втором варианте (см. рис. 2.7, в) система ЧПУ обеспечивает управление по всем трем координатам, но одновременно перемещение может быть только по двум любым координатам в разных плоскостях (X/Y, X/Z, Y/Z, так называемое управление по 21/2 координатам). На рис. 2.7, в показано управление обработкой одновременно по двум координатам в плоскости X/Y и Z/X.
При третьем варианте (см. рис. 2.7, г) управление производится одновременно по трем координатам, что позволяет обрабатывать заготовки со сложным объемным профилем (например, штампов, матриц и др.). В настоящее время практически все станки с контурными системами ЧПУ могут обеспечивать управление одновременно по трем и более координатам. Такими системами ЧПУ оснащаются в основном токарные и фрезерные станки;
в) комбинированное ЧПУ станком, позволяющее проводить управление в обоих вышеуказанных режимах. Такими системами ЧПУ оснащаются в основном многоцелевые и специализированные многокоординатные станки с управлением по четырем и более координатам (рис. 2.8).
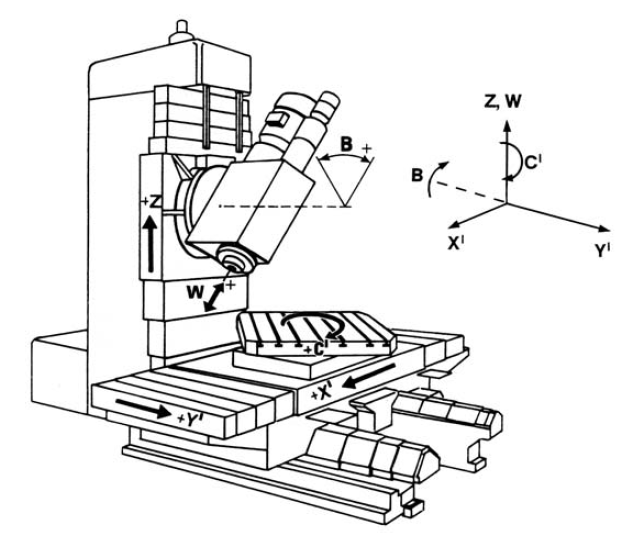
Рис. 2.8. Пример станка с ЧПУ с управлением по шести координатам
На станках с такими системами ЧПУ производится обработка заготовок большим количеством разного инструмента, что требует его автоматической смены, а также высокой точности изготовления деталей.
Системы ЧПУ станками могут строиться с управлением приводами подач без обратной связи (разомкнутыми) и с обратной связью (замкнутыми) (рис. 2.9).
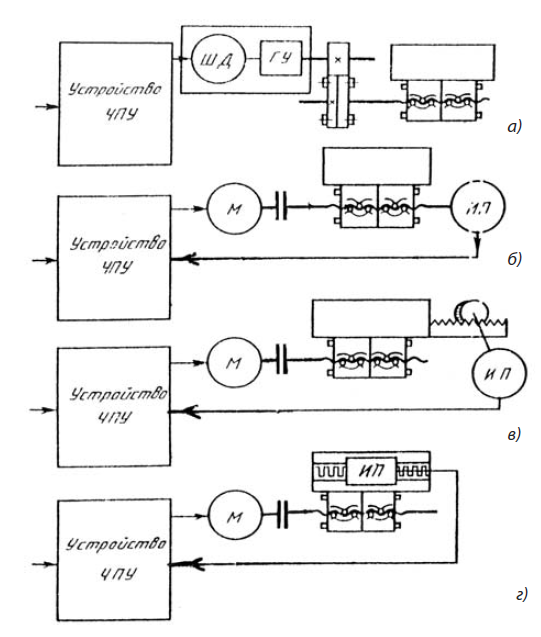
Рис. 2.9. Варианты построения систем обратной связи:
а — разомкнутая система; б — с круговым ИП на ходовом винте;
в — с круговым ИП, измеряющим перемещение через реечную передачу;
г — с линейным ИП
Разомкнутые системы ЧПУ строят на основе применения силовых или не силовых шаговых электродвигателей (ШД). В последнем случае ШД применяют в комплекте с гидроусилителем (ГУ) (рис. 2.9, а).
Подавая на ШД определенное количество импульсов, мы получаем заданную величину перемещения рабочего органа станка (стола). Частота подачи этих импульсов определяет скорость перемещения, а количество импульсов — величину перемещения.
Система управления приводами получается достаточно простой. Однако из-за отсутствия контроля действительного положения рабочего органа станка на точность его перемещения будут влиять погрешности ШД, ГУ, передачи ходовой винт–гайка привода подачи. Кроме того, ШД не позволяет получать высокие скорости перемещений рабочего органа на холостом ходу, поэтому разомкнутые системы ЧПУ в настоящее время применяются достаточно редко.
Замкнутые системы управления строятся на основе применения следящего привода, включающего в себя регулируемый электродвигатель и систему обратной связи, основой которой является измерительный преобразователь (ИП), ранее называемый датчиком обратной связи (ДОС).
В этих системах кроме прямого потока информации (см. рис. 2.9, б–г), определяющего требуемое положение рабочего органа, имеется еще обратный поток информации, определяющий действительное положение рабочего органа. На основе их сравнения определяется и выдается сигнал управления. Система управления получается более сложной, но обеспечивает высокую точность перемещения рабочих органов, а также высокую скорость их перемещения на холостых ходах.
Измерительный преобразователь (ИП) системы обратной связи включает в себя измерительный эталонный элемент, блок сравнения и блок связи. Измерение перемещения рабочего органа обеспечивается сравнением величины этого перемещения с эталонной мерой, в качестве которой могут использоваться: точная передача ходовой винт–гайка, различные типы штриховых линеек и дисков, оптические шкалы и др.
Общие технические условия на ИП определяет ГОСТ 26242–90. В соответствии с этим стандартом по виду входной физической величины ИП подразделяются на ИП линейных перемещений и ИП угловых перемещений.
По физическому принципу эквивалентного преобразования ИП подразделяются: на акустооптические (А), волновые (В), голографические (Г), емкостные (электростатические) (Е), индукционные (И), квантовые (лазерные) (К), магнитоэлектрические (гальваномагнит- ные) (М), полупроводниковые (на ПЗС-структурах) (П), резистивные (потенциометрические) (Р), ультразвуковые (У), фотоэлектрические и оптоэлектронные (Ф), электромагнитные (индуктивные) (Э).
Основным критериями выбора ИП для систем обратной связи являются:
- максимальная величина измеряемого перемещения (угла поворота);
- максимальная скорость измеряемого перемещения (поворота);
- способ измерения перемещения (косвенно или непосредственно);
- дискретность измеряемого перемещения (угла поворота);
- вид выходного сигнала (аналоговый, дискретный).
Обозначение ИП в технической документации и при заказе должно содержать:
- обозначение ИП — П;
- обозначение вида входной физической величины преобразования (Л — для линейных перемещений, У — для угловых перемещений);
- обозначение физического принципа эквивалентного преобразования — А, В, Г и др. (см. выше).
Замкнутые системы ЧПУ могут выполняться в трех вариантах в зависимости от вида применяемых ИП (см. рис. 2.9).
В замкнутых системах ЧПУ, построенных по первому варианту (см. рис. 2.9, б), производится косвенное измерением положения рабочего органа станка с помощью кругового ИП, установленного на ходовом винте. Эта схема достаточно проста и удобна с точки зрения установки ИП. Габариты применяемого ИП не зависят от величины измеряемого перемещения. Но при этом предъявляются высокие требования к точностным параметрам передачи ходовой винт– гайка, которая в этом случае не охватывается обратной связью. Применение в приводах подач станков с ЧПУ точно изготовленных передач ходовой винт–гайка с трением качения и создание в них предварительного натяга для устранения зазоров и увеличения жесткости позволяют широко применять данные системы во многих станках с ЧПУ.
Проблемой в этом случае остается влияние на точность перемещения накопленной погрешности по шагу ходового винта, всегда образующейся при его изготовлении и не охватываемой обратной связью. Однако при необходимости величина этой погрешности может быть измерена при изготовлении ходового винта и в последующем скорректирована с помощью системы ЧПУ.
В замкнутых системах ЧПУ, построенных по второму варианту (см. рис. 2.9, в), применяют также круговой ИП, но измеряющий через реечную передачу непосредственно перемещение рабочего органа станка. Однако здесь в измерение вносится погрешность реечной передачи. Кроме того, длина рейки будет зависеть от величины хода рабочего органа станка. Такой тип обратной связи применяется очень редко.
В замкнутых системах ЧПУ, построенных по третьему варианту, применяется линейный ИП (см. рис. 2.9, г).
Такая система обратной связи обеспечивает непосредственное измерение перемещения рабочего органа станка и позволяет охватить обратной связью все передаточные механизмы привода подачи, чем достигается высокая точность перемещений. Однако линейные ИП сложнее и дороже, чем круговые. Их габариты зависят от длины хода рабочего органа станка. Установка линейного ИП на станке и его эксплуатация — трудоемкие процессы. На точность измерения такими ИП могут оказывать влияние погрешности станка (температурные деформации узлов станка, погрешности их геометрических параметров, износ направляющих). Данные ИП требуют хорошей защиты от попадания масла, СОЖ и стружки. Системы ЧПУ, и в частности устройства ЧПУ, в своем развитии прошли несколько этапов, определяемых уровнем развития электронной техники, представляющей разработчикам этих систем управления определенную элементную базу: релейно-контакторную и транзисторную базы, микросхемы малой и средней степени интеграции, мини-ЭВМ и микропроцессоры. В результате по структуре построения различают устройства ЧПУ двух видов:
- аппаратные (типа NC — Numerical Control);
- программируемые или микропроцессорные (типа CNC — Computer Numerical Control).
Аппаратным устройством ЧПУ, или устройством с жесткой структурой, называют устройство, алгоритмы работы которого реализуются схемным путем и не могут быть изменены после изготовления устройства. Эти устройства ЧПУ (например, Н22, НЗЗ, Размер-2М и др.) широко применялись ранее для управления различными типами отечественных станков. В настоящее время эти устройства ЧПУ не выпускаются.
Программируемым устройством ЧПУ называют устройство, алгоритмы работы которого реализуются с помощью программ, вводимых в его память, и могут быть изменены после изготовления этого устройства (рис. 2.10).
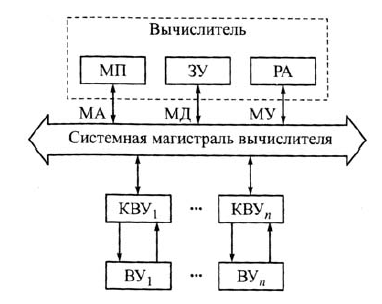
Рис. 2.10. Укрупненная структурная схема программируемого устройства типа ЧПУ (класса CNC)
Принципиальным отличием программируемых УЧПУ от аппаратных является их структура, соответствующая структуре управляющей ЭВМ и включающая аппаратные средства и программное обеспечение (ПО), под которым понимают совокупность программ и документации на них для реализации целей и задач, выполняемых системой ЧПУ при управлении станком. В состав программируемой системы ЧПУ входит один или несколько вычислителей, основой которых являются микропроцессоры. Поэтому эти системы ЧПУ называют также микропроцессорными, а когда несколько вычислителей, то мультипроцессорными.
Микропроцессорная УЧПУ (см. рис. 2.10) включает в себя микропроцессор МП, запоминающее устройство ЗУ, расширитель арифметических функций РА и контроллеры внешних устройств КВУn. Обмен информацией между ее блоками осуществляется по специальному каналу обмена — системной магистрали СМ.
Микропроцессор, память, расширитель арифметических функций, объединенные системной магистралью, составляют вычислитель микропроцессорной системы, с которым через контроллеры внешнего устройства КВУ сопрягаются внешние устройства ВУn, необходимые для управления станком и связи с оператором.
Микропроцессор в микропроцессорной системе выполняет следующие функции:
- формирование синхронизирующих и управляющих сигналов для всех компонентов системы;
- выборку данных из памяти системы;
- декодирование команд, арифметические, логические и другие операции, закодированные в команды;
- управление передачей данных между регистрами микропроцессора, а также запоминающего и внешних устройств;
- обработку сигналов от внешних устройств.
Расширитель арифметических функций необходим для повышения производительности микропроцессорной системы при выполнении операций, входящих в базовый набор арифметических функций. Наиболее часто выполняемая арифметическая функция — умножение слов длиной в 16 и 32 разряда.
Контроллер внешнего устройства включает в себя схемы сопряжения внешнего устройства с системной магистралью (интерфейс) и схемы преобразования входных и выходных данных внешнего устройства.
Названные устройства связаны между собой магистралями для передачи адресов МА, данных МД и управляющей информации МУ.